Design and Fabrication of Vehicle Monitoring Circuits
May 2021
Motivation
Baja SAE is a college-level off-road vehicle competition, where teams build a car, almost from scratch, to compete in a 4-hour endurance race. I am Electrical Lead on Olin’s Baja SAE team. To tune our CVT better and gather data for our new 4-wheel drive design, we are placing wheel speed sensors on all four wheels. After communicating with the Suspension Team, we decided to have ride height sensors on all of the knuckles as well.
Details
In order to receive signals from multiple sensors on all four wheels, we decided to relay these signals via CANbus to the main data acquisition board, which stores the data on an SD card and sends the data wirelessly back to the pit. The board has inputs from the ride height and hall effect sensors for wheel speed. It uses an ATmega328 for a microcontroller and allows programming via ICSP. Embedded code on the microcontroller computes wheel speed and ride height from sensor inputs. From the microcontroller, it sends wheel speed and ride height data through a SPI-to-CAN module and out through a CAN line to the main data acquisition board.
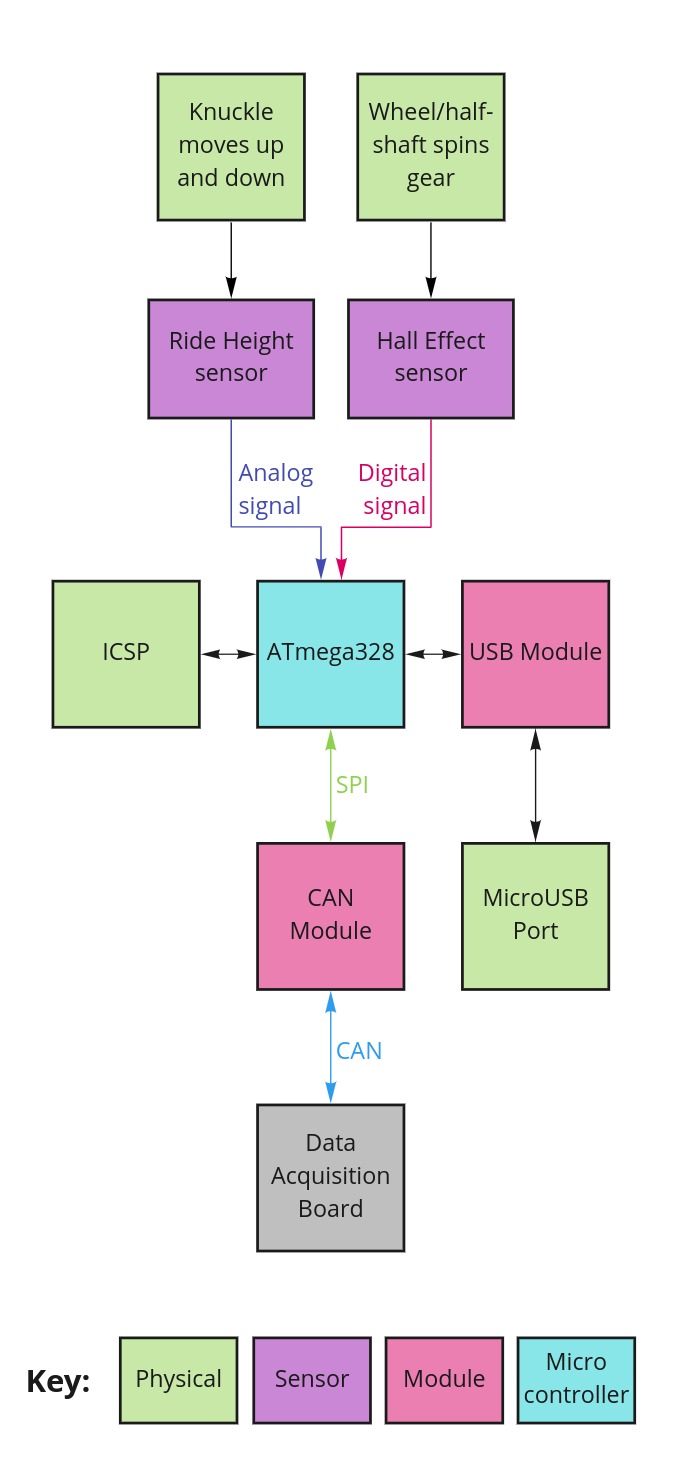 Block diagram for wheel board.
Block diagram for wheel board.
Reflection
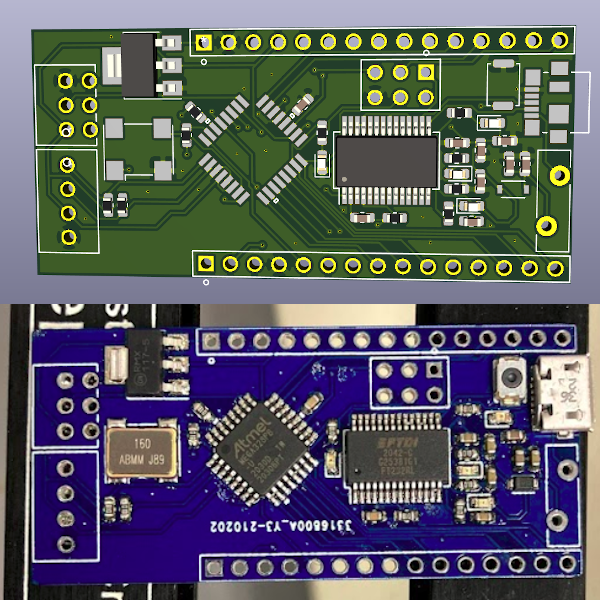
This project was my first time making a PCB from start to finish. I learned a lot about creating schematics, using KiCAD, selecting components, and ordering/assembly.